
Seit Jahren verwenden wir bei unseren Hüftprothesen
Implantationen computer-assistierte Verfahren zur Positionierung der Implantate und exakten Rekonstruktion der Beinlänge.
Unsere Praxis articon zählt zu den Pionieren der computer-gestützten und roboter-assistierten Chirurgie in Europa.
Seit 2005 werden Hüftprothesen bei articon standardmässig computernavigiert implantiert. Dies wurde zusammen mit einem minimal-invasiven antero-lateralen Zugang eingeführt, da die Computerassistenz trotz reduzierter Einsicht in das Wundgebiet die Präzision der Implantatposition sicherstellt. Mittlerweile wurden durch uns über 1500 Hüftprothesen mit dieser Technik durchgeführt
Ab 2019 haben wir schrittweise begonnen die Hüftprothesen in Roboter-unterstützter Technik zu implantieren. Seit 2022 ist dies praktisch unser Standardverfahren geworden. Durch die Verwendung der MAKO-Robotertechnik sind wir noch exakter in der Positionierung der Hüftpfanne. Dies reduziert die Komplikationen und auch den Verschliess der Hüftprothesen durch biomechanisch optimale Ausrichtung des Implantats. In Kombination mit der Kurzschaftprothese am Oberschenkelknochen können wir noch anatomischer, weniger invasiv und muskelschonender operieren. Dadurch kommen die Patientinnen und Patienten merklich schneller und schmerzärmer wieder auf die Beine. Die Liegezeit im Spital und die gesamte Rehabilitationszeit haben sich seit Einführung der Robotik verkürzt.
Wie läuft eine MAKO roboterarm-assistierte Hüft-Operation ab?
Das MAKO-Verfahren hilft, die individuelle Anatomie präzise dreidimensional darzustellen und bei Bedarf mit der Positionierung des Implantates zu korrigieren.
Vor der Operation wird eine Computertomographie des Beckens erstellt und daraus am Computer ein exaktes Modell Ihres Hüftgelenks. Bereits vor der Operation kann so die Implantatposition und -grösse genau geplant werden, damit das natürliche Hüftgelenk wieder korrekt anatomisch hergestellt wird.
In der Operation werden zuerst Markierungen am Oberschenkel- und Beckenknochen installiert, die mit Reflektoren bestückt sind. Mit einer Infrarotkamera können so die Becken- und Beinposition registriert werden. Dies ermöglicht später das exakte dreidimensionale Positionieren der Prothesenkomponenten und die korrekte Einstellung und Überprüfung der Beinlänge und des Offsets (Hebelarm der Muskulatur).
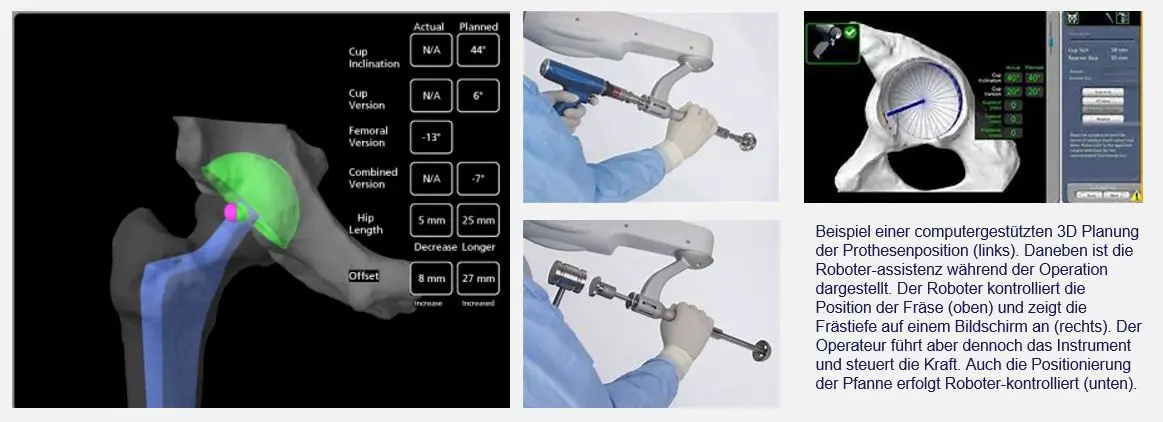
Die Fräsung des Pfannenbettes und das Einschlagen der Pfannenkomponente erfolgt mit Unterstützung des Roboterarms, wie unten dargestellt. Der Operateur hat stets die vollständige Kontrolle. Der Roboter wirkt rein unterstützend und stellt sicher, dass der Chirurg keinen Fehler machen kann. Da man alle Parameter auf dem Bildschirm sehen kann, kann mit dem Roboter weniger invasiv operiert werden.
Der Hüftschaft wird von Hand vorbereitet und zunächst eine Probeprothese eingesetzt. Mit Hilfe der Navigation und Knochenmarkierungen werden dann die korrekte Beinlänge und Hebelarm (=Offset) kontrolliert und feinjustiert bevor die definitive Prothese implantiert wird.
Zuzahlung für die Roboter-Technologie
Zum derzeitigen Zeitpunkt wird die roboter-gestützte Technik und die damit verbundenen Mehrkosten nur von einer halbprivaten oder privaten Zusatzversicherung übernommen. Allgemein-versicherte Patientinnen und Patienten, die sich für die MAKO-Technik entscheiden müssen einen Selbstbehalt von CHF 1200 übernehmen.