
Der MAKO-Operationsroboter unterstützt den Chirurgen bei der exakten Umsetzung dieses Computerplans.
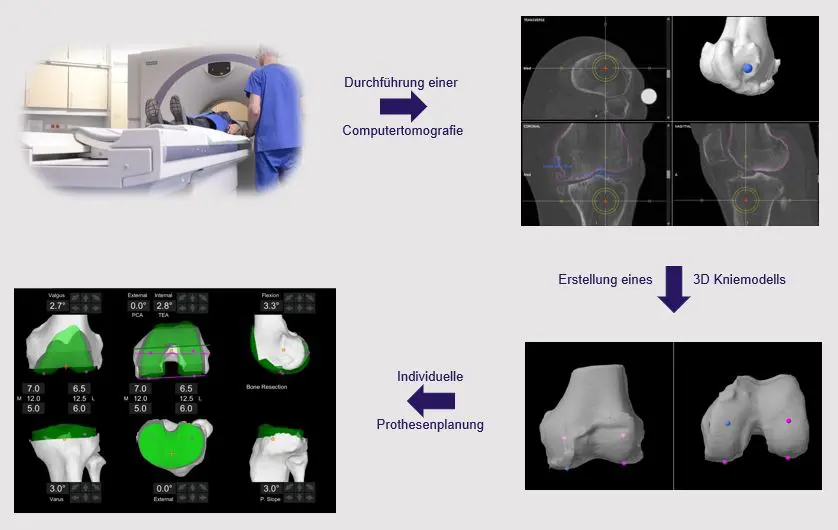
Individuelle 3D-Planung
Als Vorbereitung für eine MAKO Operation wird zunächst eine Computertomografie des betroffenen Gelenkes, bzw. des Beines erstellt. Dies geschieht in der Regel etwa 2 Wochen vor der Operation und wird bei uns im Salem-Spital durchgeführt, da hier die dafür zertifizierten Geräte bereitstehen. Die Untersuchung selbst dauert nur wenige Minuten. Aus diesen Bildern wird vor der Operation von einem Spezialisten-Team am Computer ein virtuelles, dreidimensionales Modell Ihres Gelenkes erstellt und eine erste Planung der Operation durchgeführt. Dieses Modell, sowie die Planung werden dann dem Operateur gezeigt. Der Operateur kann dabei alle Planungsschritte nachvollziehen und ggf. die Operationsplanung an Ihre Bedürfnisse anpassen oder optimieren.
Mit dieser Planung kann die Operation beginnen. Die gesamte Operationsvorbereitung unterscheidet sich für Sie nicht von unserem sonstigen Standardprozedere, insbesondere was Narkoseverfahren oder Operationszeit betrifft. Während Sie sich noch in der Operationsvorbereitung befinden, werden der Computer im Operationssaal hochgefahren und der Roboterarm kalibriert. Dies wird jeweils von einem speziell ausgebildeten Mitarbeiter des Herstellers gemacht, der jede der MAKO Operationen von Anfang bis Ende begleitet. Sie werden in den Operationsaal gefahren, wo bereits alles aufgebaut und vorbereitet ist. Die Desinfektion und das Abdecken erfolgten wie bei jedem anderen Eingriff auch mit grösster Sorgfalt. Auch unterscheiden sich der Operationszugang und die Darstellung des Gelenkes nicht wesentlich von anderen Operationen.
Im nächsten Schritt – und das ist spezifisch für alle computer-gestützten Operationsverfahren – werden optische Marker am Ober- und Unterschenkelknochen, bzw. am Beckenknochen befestigt. Über diese Marker erkennt das Navigationssystem mit Infrarotkamera während der gesamten Operation, in welcher Position sich Ihr Bein im Raum befindet. Dann werden mit Bewegungen und Tastinstrumenten die Anatomie Ihres Knie- oder Hüftgelenks mit dem 3D-Knochenmodell im Computer abgeglichen. Dieser gesamte Prozess nimmt weniger als 5 Minuten in Anspruch. Nun besteht ein sehr exaktes Bild Ihrer Knochenanatomie im Computer.

Feinjustierung der Planung in der Operation
Für die korrekte Einstellung der Prothesenkomponenten am Kniegelenk fehlen allerdings noch die Informationen zu den Bändern und Weichteilen. Dafür wird in einem nächsten Schritt zusätzlich die Bandspannung in unterschiedlichen Positionen des Gelenkes in das System eingelesen. Der Chirurg bewegt hierfür des Gelenk passiv durch und speichert die Bandstabilität dabei ab. Jetzt wird der initiale Operationsplan in Bezug auf die Weichgewebe überprüft. Zielsetzung ist es, ein über den gesamten Bewegungsradius stabiles Gelenk mit einem möglichst natürlichen Bewegungsablauf zu rekonstruieren. Die Planung kann entsprechend angepasst und jeder einzelne Parameter dreidimensional im 0,5 mm oder 0,5°-Bereich verändert werden.
Am Hüftgelenk geht es um eine exakte Rekonstruktion der Beinlänge und der Hebelarme der Muskulatur. Dafür wird die Beinlänge und das Offset der Hüfte vor der Prothesenoperation gemessen und dann mit einer Probeprothese. Nun lässt sich während der Operation die optimale Beinlänge und Spannungsverhältnisse auch in Bezug zu der Gegenseite überprüfen und schrittweise einstellen. Mit Hilfe einer Computersimulation kann sogar der Bewegungsradius angeschaut werden und durch Anpassungen der Prothesenposition optimiert werden.
Roboter-gestützte Operationsdurchführung
Erst wenn diese virtuelle Planung optimiert ist, wird der eigentliche Roboterarm an den Operationstisch gefahren und eingerichtet. Noch einmal erfolgt die Überprüfung der Kalibrierung mit einer Fehlertoleranz von unter 0,5 mm. Jetzt werden mit Hilfe des MAKO Roboterarmes die Sägeschnitte angelegt, bzw. das Prothesenbett gefräst. Das eigentliche Instrument wird dabei zu jederzeit vom Chirurgen geführt. Der Roboter gibt lediglich die korrekte und geplante Sägeebene vor, bzw. verhindert ein falsches Einstellen der Säge oder Fräse. Außerdem gibt er enge Grenzen für die Instrumente vor. Wann immer der Chirurg den definierten Sägebereich verlassen möchte, stoppt das Gerät automatisch. Dadurch werden die umliegenden Weichteilstrukturen besser als mit jedem Haken geschützt. Nachdem alle Sägeschnitte durchgeführt sind, kann die Probeprothese eingesetzt werden und damit noch einmal der korrekte Sitz und die korrekte Bandstabilität überprüft werden.
Dies wird durch den Computer noch einmal objektiv ausgewertet. Sollten sich irgendwelche Abweichungen zeigen, kann jederzeit eine Korrektur mit dem System vorgenommen werden. Verläuft alles nach Plan wird dann die Originalprothese eingesetzt. Anschließend erfolgen der übliche Wundverschluss und das Entfernen der Navigationshilfen. Die Nachbehandlung und Rehabilitation entspricht unserem Standard Nachbehandlungsschema, wobei wir wegen der weichteilschonenden Technik häufig eine schnellere Rehabilitation beobachten.