
Le robot chirurgical MAKO assiste le chirurgien dans l'exécution exacte de ce plan informatique.
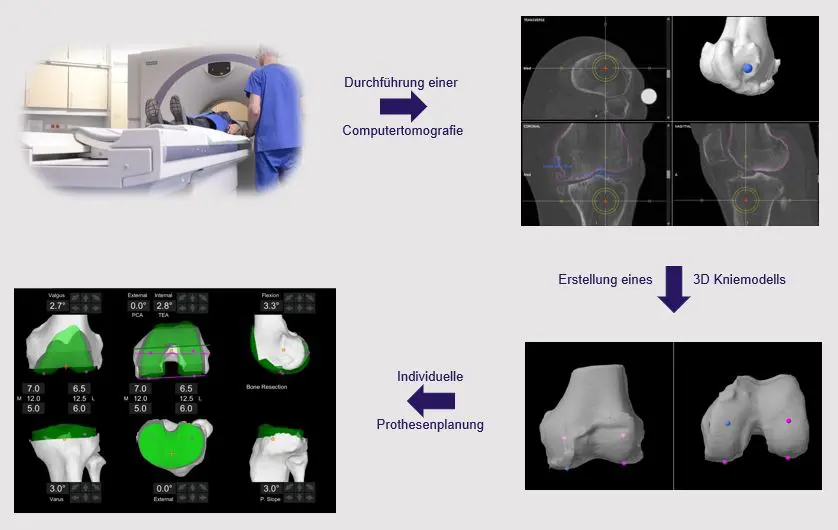
Planification 3D personnalisée
En préparation à l'opération MAKO, un scanner de l'articulation ou de la jambe concernée est d'abord réalisé. Cela se fait généralement environ deux semaines avant l'opération et est réalisé chez nous, au Salem-Spital, car nous disposons des appareils certifiés à cet effet. L'examen lui-même ne dure que quelques minutes. À partir de ces images, une équipe de spécialistes crée sur ordinateur un modèle virtuel en trois dimensions de votre articulation avant l'opération et procède à une première planification de l'opération. Ce modèle, ainsi que la planification, sont ensuite montrés au chirurgien. Le chirurgien peut alors suivre toutes les étapes de la planification et, le cas échéant, adapter ou optimiser la planification de l'opération en fonction de vos besoins.
Avec cette planification, l'opération peut commencer. L'ensemble de la préparation à l'opération ne diffère pas de nos autres procédures standard, notamment en ce qui concerne les procédures d'anesthésie ou la durée de l'opération. Pendant que vous vous préparez à l'opération, l'ordinateur de la salle d'opération est mis en marche et le bras du robot est calibré. Cette opération est effectuée par une personne spécialement formée par le fabricant, qui accompagne chaque opération MAKO du début à la fin. Vous êtes conduit dans la salle d'opération où tout est déjà installé et préparé. La désinfection et le drapage ont été effectués avec le plus grand soin, comme pour toute autre intervention. De même, l'accès à l'opération et la présentation de l'articulation ne sont pas très différents des autres opérations.
L'étape suivante, spécifique à toutes les procédures chirurgicales assistées par ordinateur, consiste à fixer des marqueurs optiques sur le fémur et le tibia, ou sur l'os du bassin. Grâce à ces marqueurs, le système de navigation avec caméra infrarouge reconnaît pendant toute l'opération la position de votre jambe dans l'espace. Des mouvements et des instruments tactiles sont ensuite utilisés pour comparer l'anatomie de votre genou ou de votre hanche avec le modèle osseux en 3D sur ordinateur. L'ensemble de ce processus prend moins de 5 minutes. Il existe maintenant une image très précise de votre anatomie osseuse sur l'ordinateur.

Ajustement fin de la planification dans l'opération
Pour le réglage correct des composants de la prothèse du genou, il manque cependant encore les informations sur les ligaments et les parties molles. Pour cela, l'étape suivante consiste à enregistrer dans le système la tension des ligaments dans différentes positions de l'articulation. Pour ce faire, le chirurgien déplace passivement l'articulation et enregistre la stabilité des ligaments. Le plan chirurgical initial est maintenant vérifié en ce qui concerne les tissus mous. L'objectif est de reconstruire une articulation stable sur toute l'amplitude de mouvement avec un mouvement aussi naturel que possible. Le plan peut être adapté en conséquence et chaque paramètre peut être modifié en trois dimensions dans une plage de 0,5 mm ou 0,5°.
Au niveau de l'articulation de la hanche, il s'agit de reconstruire avec précision la longueur de la jambe et les bras de levier des muscles. Pour cela, la longueur de la jambe et le décalage de la hanche sont mesurés avant l'opération de prothèse, puis avec une prothèse d'essai. Il est désormais possible de vérifier la longueur optimale de la jambe et les rapports de tension pendant l'opération, également par rapport au côté opposé, et de les ajuster progressivement. Une simulation informatique permet même de visualiser l'amplitude de mouvement et de l'optimiser en ajustant la position de la prothèse.
Exécution d'opérations assistée par robot
Ce n'est que lorsque cette planification virtuelle est optimisée que le bras robotisé proprement dit est déplacé vers la table d'opération et réglé. Le calibrage est à nouveau vérifié avec une tolérance d'erreur inférieure à 0,5 mm. Le bras robotisé MAKO permet maintenant de réaliser les coupes de scie ou de fraiser le lit de la prothèse. L'instrument proprement dit est guidé à tout moment par le chirurgien. Le robot se contente d'indiquer le plan de sciage correct et planifié, ou d'empêcher un mauvais réglage de la scie ou de la fraise. Il fixe également des limites strictes pour les instruments. Chaque fois que le chirurgien souhaite quitter la zone de sciage définie, l'appareil s'arrête automatiquement. Les structures des tissus mous environnants sont ainsi mieux protégées qu'avec n'importe quel crochet. Une fois que toutes les coupes ont été effectuées, la prothèse d'essai peut être mise en place, ce qui permet de vérifier une fois de plus qu'elle est bien en place et que les ligaments sont bien stables.
Ceci est évalué une nouvelle fois de manière objective par l'ordinateur. Si des écarts sont constatés, le système peut être corrigé à tout moment. Si tout se passe comme prévu, la prothèse originale est mise en place. On procède ensuite à la fermeture habituelle de la plaie et au retrait des aides à la navigation. Le traitement postopératoire et la rééducation correspondent à notre schéma de traitement postopératoire standard, bien que nous observions souvent une rééducation plus rapide en raison de la technique de préservation des tissus mous.