
Depuis des années, nous utilisons des procédures assistées par ordinateur pour le positionnement des implants et la reconstruction exacte de la longueur de la jambe pour nos prothèses de hanche
Implantations.
Notre cabinet articon est l'un des pionniers de la chirurgie assistée par ordinateur et robotisée en Europe.
Depuis 2005, les prothèses de hanche sont implantées de manière standard par navigation informatique chez articon. Cette technique a été introduite en même temps que l'accès antéro-latéral peu invasif, car l'assistance par ordinateur garantit la précision de la position de l'implant malgré une visibilité réduite de la plaie. Depuis, nous avons réalisé plus de 1500 prothèses de hanche avec cette technique.
À partir de 2019, nous avons progressivement commencé à implanter les prothèses de hanche selon la technique assistée par robot. Depuis 2022, c'est pratiquement devenu notre procédure standard. L'utilisation de la technique robotisée MAKO nous permet d'être encore plus précis dans le positionnement de la cupule de la hanche. Cela réduit les complications et également l'obstruction des prothèses de hanche grâce à un alignement biomécanique optimal de l'implant. En combinaison avec la prothèse à tige courte sur le fémur, nous pouvons opérer de manière encore plus anatomique, moins invasive et en ménageant les muscles. Les patients peuvent ainsi se remettre sur pied beaucoup plus rapidement et avec moins de douleurs. Le temps d'hospitalisation et le temps total de rééducation ont été réduits depuis l'introduction de la robotique.
Comment se déroule une opération de la hanche assistée par bras robotisé MAKO ?
La procédure MAKO aide à représenter précisément l'anatomie individuelle en trois dimensions et, si nécessaire, à la corriger en positionnant l'implant.
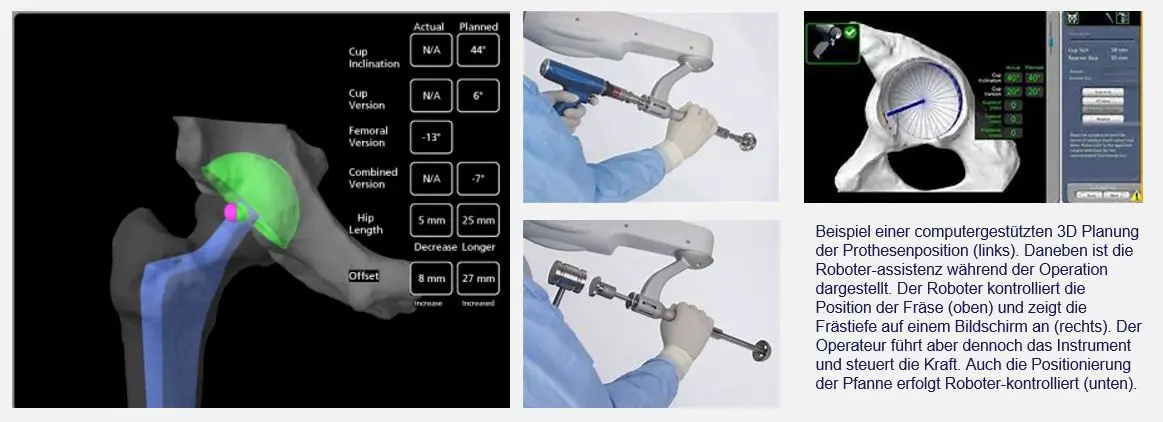
Avant l'opération, un scanner du bassin est réalisé et, à partir de celui-ci, un modèle exact de votre articulation de la hanche est créé sur ordinateur. La position et la taille de l'implant peuvent ainsi être planifiées avec précision avant l'opération afin de rétablir l'anatomie correcte de l'articulation naturelle de la hanche.
Au cours de l'opération, on installe d'abord des repères sur le fémur et le bassin, équipés de réflecteurs. Une caméra infrarouge permet ainsi d'enregistrer la position du bassin et de la jambe. Cela permet ensuite de positionner exactement les composants de la prothèse en trois dimensions et de régler et vérifier correctement la longueur de la jambe et le décalage (bras de levier des muscles).
Le fraisage du lit de la cupule et l'enfoncement du composant de la cupule sont réalisés avec l'aide du bras robotisé, comme illustré ci-dessous. Le chirurgien a toujours le contrôle total. Le robot agit uniquement en tant que soutien et garantit que le chirurgien ne peut pas faire d'erreur. Comme il est possible de voir tous les paramètres à l'écran, le robot permet d'effectuer des opérations moins invasives.
La tige de la hanche est préparée manuellement et une prothèse d'essai est d'abord mise en place. La longueur correcte de la jambe et le bras de levier (=décalage) sont ensuite contrôlés et ajustés avec précision à l'aide de la navigation et des repères osseux avant l'implantation de la prothèse définitive.
Paiement complémentaire pour la technologie robotique
A l'heure actuelle, la technique robotique et les coûts supplémentaires qu'elle entraîne ne sont pris en charge que par une assurance complémentaire semi-privée ou privée. Les patients couverts par l'assurance générale qui optent pour la technique MAKO doivent prendre en charge une quote-part de 1200 CHF.